Multi-agent systems can model both cooperative/competitive agents and the joints of a robot — where each joint is itself an agent. Below are research directions spanning both settings.
Muscle Synergy
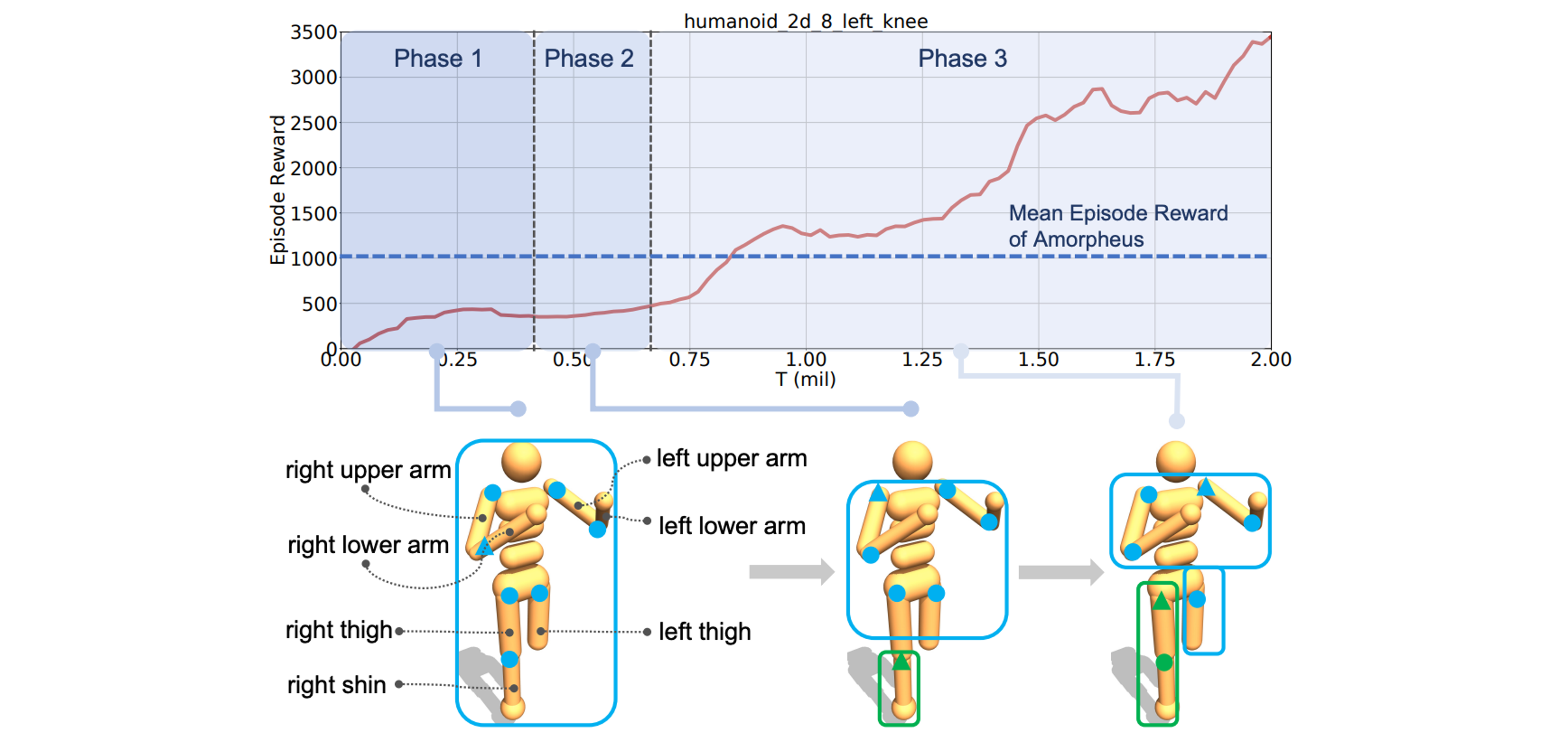
PaperA human central nervous system decreases the control complexity by producing a small number of electrical signals and activating muscles in groups. We achieve this in robots. [NeurIPS 2022]
The following figure shows the synergy structure evolution enabled by our method. Phases are divided according to changes in synergy clusters. Synergy clusters are masked with colored shapes.
Morphology Learning
PaperHow to learn an effective morphology for a specific task that is symmetric? [ICML 2023]
The following figure shows the morphology evolution enabled by our method.

Organization
Example PaperRelated publications: [ROMA, ICML 2020; RODE, ICLR 2021]
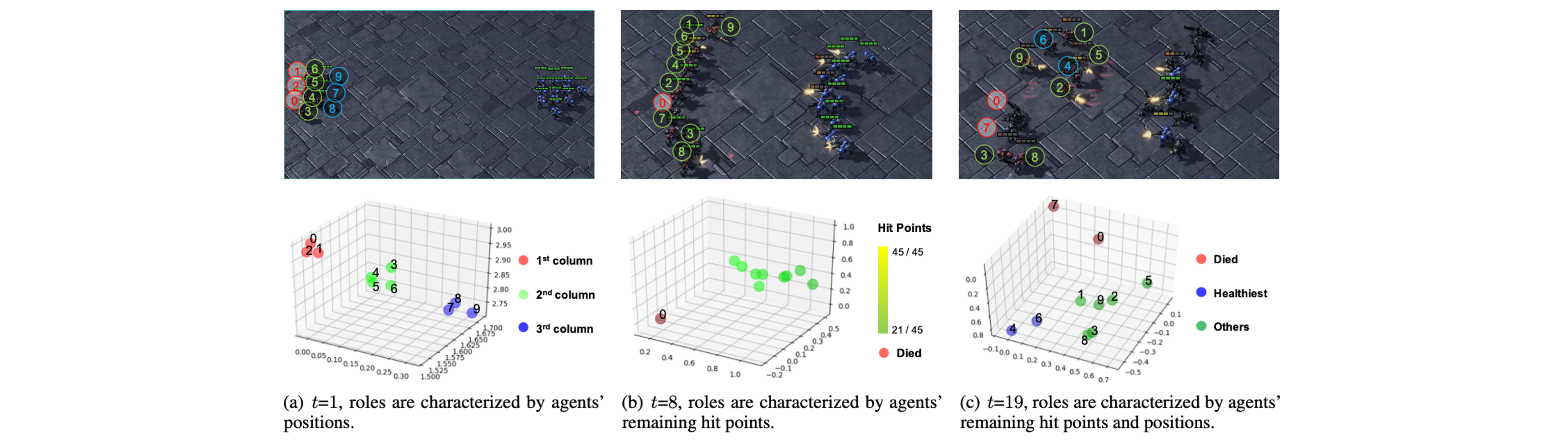
We developed role-based learning, where agents learn their roles to decompose a complex task.
In the figure below, we show changes in roles of different agents in an episode. The role will decide the agent's behavior.
Communication
Example PaperRelated publications: [NDQ, ICLR 2020; Pragmatic Reasoning Communication, NeurIPS 2020]
We studied sparse, concise, but informative communication.
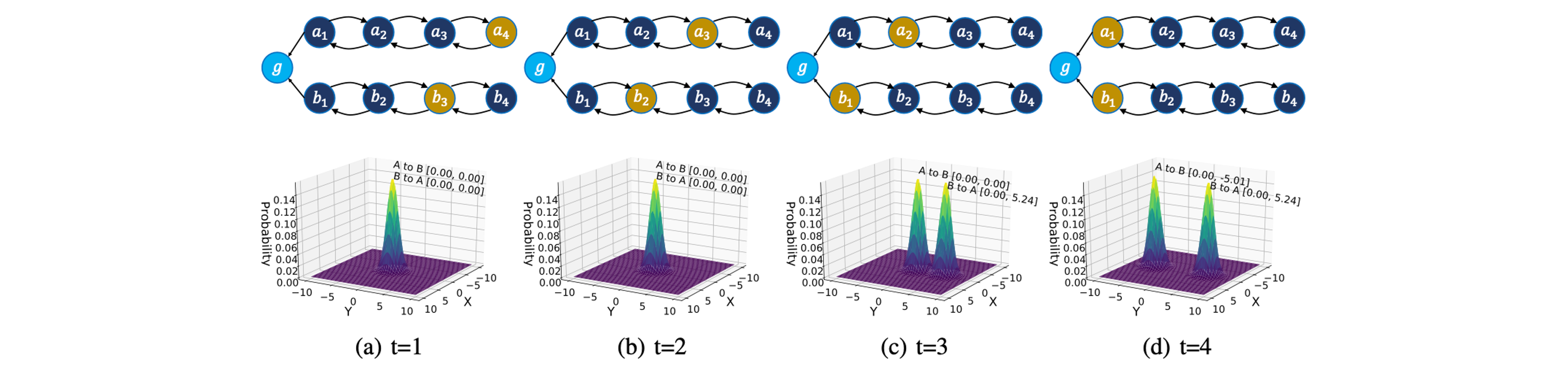
In the following figure, two agents start at a_4 and b_3, respectively, and they want to reach g simultaneously but can only observe its own state. To finish the task, they need to communicate their location to each other.
The second row shows our communication strategy. 0 means no communication. Agents learn to only send a bit when they are one step away from the goal state.
Diversity
Example PaperRelated publications: [CDS, NeurIPS 2021]
We find that diversity matters in multi-agent collaboration.
The following figure shows that our method learns versatile strategies by encouraging diversity in the difficult Google football tasks.

Coordination
Example PaperRelated publications: [NLCG, NeurIPS 2022; SOP-CG, ICML 2022; CASEC, ICLR 2022]
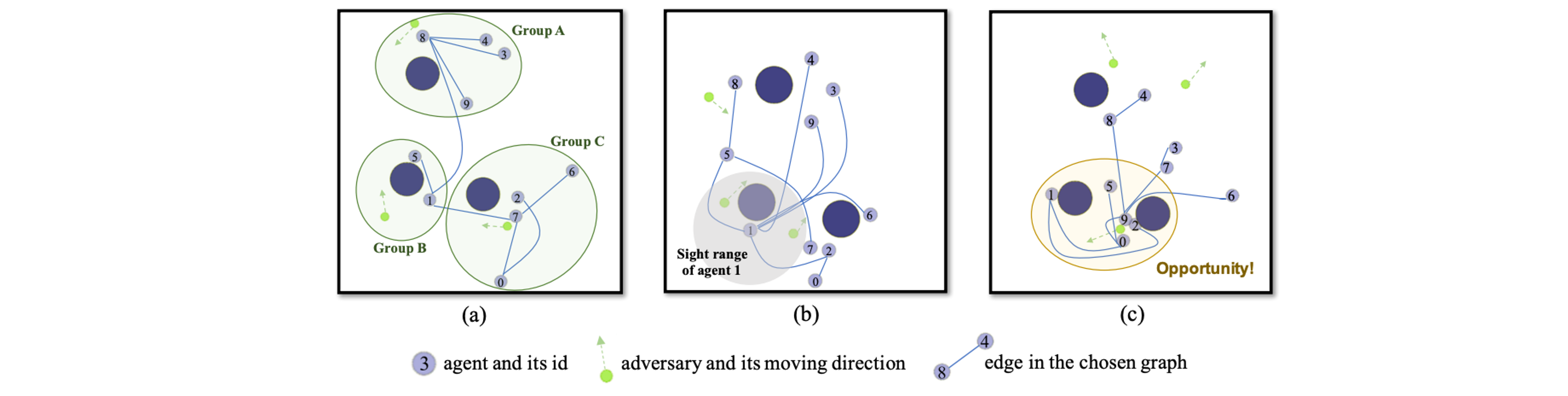
Coordination graphs: sparse, non-linear, and self-organized.
The following figure shows how the coordination structure could be adaptive: (a) Self-organized grouping at initialization; (b) Connecting to agent with rich observation for better information sharing; (c) Concentrated collaboration structure around an enclosed adversary.
Exploration
Example PaperRelated publications: [EDTI, ICLR 2020]
We find that encouraging agents' influence on each other can encourage exploration in large observation-action spaces.
Cooperation
Example PaperRelated publications: [DOP, ICLR 2020]
We developed a multi-agent policy gradient method with significantly reduced variance.
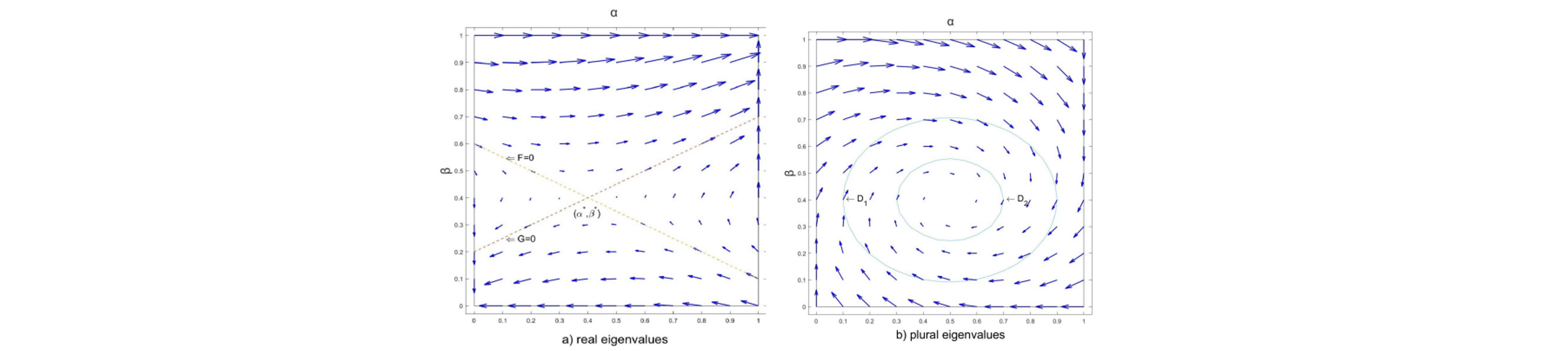
Learning in Games
Example PaperRelated publications: [GA-SPP, AAMAS 2019]
GA-SPP is the first gradient-ascent algorithm with a finite learning rate that provides convergence guarantee in general-sum games, including m×n positive semi-definite games and 2×n general-sum games.
Robustness
Example PaperRelated publications: [TRAM, NeurIPS Workshop 2022]
We study how to improve the robustness of multi-agent learning algorithms by attacking them during training time.
Transfer
Example PaperRelated publications: [MATTAR, NeurIPS Workshop 2022]
How to transfer the policy learned by one multi-agent team to another?